

在地产行业发展进入“管制”且人口红利逐渐消失的大背景下,智能电动车已然成为从中央到地方政府眼中的驱动新一轮经济增长的最重要动力。在这一轮汽车“新四化”浪潮中,自动驾驶无疑是智能电动车领域诸多前瞻技术中那颗最耀眼的明珠。作为自动驾驶行业技术第一梯队公司之一——领骏科技用自己特有的正向设计与系统工程双轮驱动理念实现了国内最高的“技术成果/资本投入”产出投入比。
公司利用五年时间精益研发仅花费数千万元就实现了在高速、隧道、环岛、收费站、上下班高峰、雨天等高复杂度场景下的L4级别高等级、全场景、可量产的全栈自动驾驶方案,乘用车在城市道路下的自动驾驶性能和功能表现可媲美百度、小马等头部公司。
正向设计+系统工程 领骏科技已经占据自动驾驶技术制高点
杨文利博士是自动驾驶业内少有的集“决策规划算法+系统工程知识+产品化理念”为一体的专家型人才。与自动驾驶行业大多数创始人的计算机或车辆专业背景不同,杨文利是清华自动化系的高材生,自动化专业是科技领域的“万金油”,是典型的系统工程科班专业;2009年杨文利在美国博士毕业后留美在西部数据做了四年首席架构师,进一步实践了系统工程理念,同时,学习和积累了产品化理念;2014年,余凯把杨文利从美国召回国,让他在百度自动驾驶部门担任决策、规划、控制、仿真模块的负责人。正是这样的契机,让杨文利有机会亲历了百度阿波罗L4自动驾驶系统基础架构从0到1的发展历程,在百度三年技术经历使得杨文利在算法上又有了很高的造诣。
和其他自动驾驶科技公司相比,领骏科技在技术上最大优势在于正向设计与系统工程双轮驱动,而这也是公司能够实现远高于同行的产出/投入比的重要原因之一,资本的核心价值在这里体现的更加高效。

正向设计,是指从最终的结果出发,来倒推设计方案。具体来看,就是从自动驾驶的最终输出(即刹车油门方向指令)出发,推导决策规划系统的算法架构;再根据决策规划系统对环境信息的需求,进一步推导感知系统的设计方案,也就是大脑指挥眼睛。这么做的最大好处之一是可以最大限度地优化系统设计,使自动驾驶的软硬件架构更加合理,从而在提升可靠性的同时降低自动驾驶系统的总体成本。例如,领骏科技,根据决策规划大脑对于环境感知的需求,正向设计感知方案,在满足决策规划所需全部环境数据的同时,尽可能将传感器内嵌于车身内部。在满足车身360度无死角多冗余感知的同时,避免了塔型感知方案带来的限高、风阻、和潜在的被动安全问题。
而系统工程,则是把多个不可靠、不理想的系统,结合成一个可靠的系统。没有哪种传感器是绝对可靠的,没有哪种算法是绝对完美的。单一追求某个传感器的精度,单一追求某一个算法的性能无疑会大幅提升硬件和研发成本。如何将不同类型的传感器组合起来,将不同的算法配合起来,将不同的人才组织起来,各自取长补短,从而达到整体系统的最优化配置,是系统工程的精髓所在。
打造一款产品,更多还是希望能够落地相关设计,从性能和成本两个维度被消费者所接受。用正向设计和系统工程的理念,其实是回归工业设计与商业实践的本质,是加速产品取得更大经济和社会效益的必经之路。
依托四大核心技术领骏科技精益打磨技术和产品
众所周知,百度、小马、Waymo以及Cruise等技术头部自动驾驶公司的RoboTaxi在城市开放道路下的各种复杂工况下行驶,是目前技术难度最高的自动驾驶场景。支撑这些公司开展Robotaxi业务的,是其对于包括自动驾驶算法平台以及自动驾驶系统集成等核心技术的自研。同样作为行业内技术领先公司,领骏科技也已经在感知融合、决策规划、仿真平台和高精地图等方面构建了自己的核心竞争力。
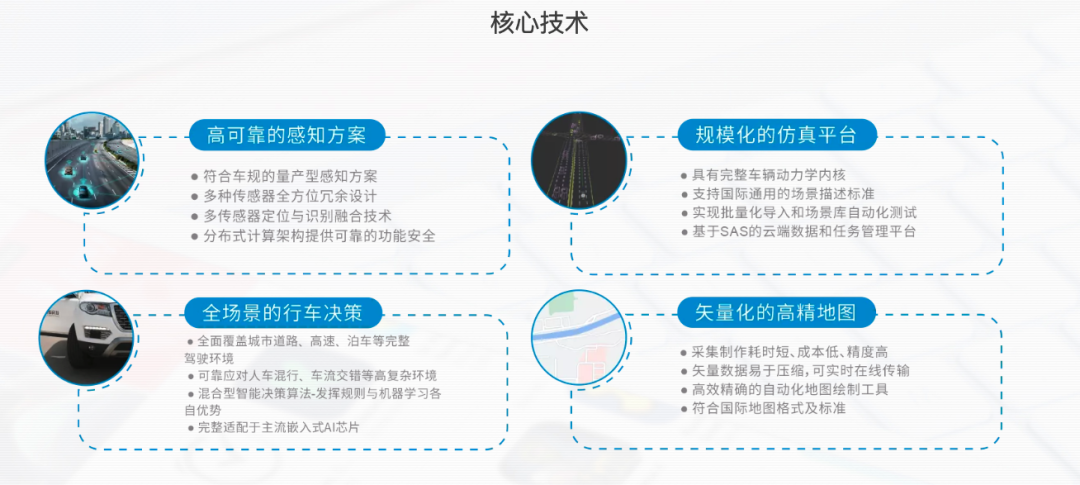
和其他公司自动驾驶方案不同,领骏科技在规划自身的设计方案时,就从量产角度出发,通过部署多种传感器的全方位冗余设计以及多种传感器定位与识别融合技术,设计出了符合车规的量产型感知方案。而分布式计算架构提供可靠的功能安全,让自身的感知技术方案更加可靠。
在行车决策方面,领骏科技的全场景的行车决策不仅全面覆盖了城市道路、高速、泊车等完整驾驶环境,且能够可靠应对人车混行、车流交错等高复杂环境。尤其值得一提的是,领骏科技的混合型智能决策算法,能够发挥规则与机器学习各自优势,更好地去应对复杂的城市路况。众所周知,基于规则方法与机器学习方法各有各的优点:规则可以追溯逻辑,也可以枚举分支,但无法自主学习和提升驾驶能力,对于复杂场景的处理能力较为有限;而机器学习则可以从数据中自动提取特征,自主进行迭代提升,但却无法对逻辑进行追溯。两者的融合,能够有效弥补各自的不足,在应对复杂工况时更加游刃有余。
对于自动驾驶系统来说,在进行实车测试之前,通过仿真技术发现潜在的风险不仅很有必要,而且能够显著提升安全性,降低测试成本。为此,领骏科技在成立之初就自研了具有数据闭环的交互式仿真数据平台。该平台可以对真实路测数据进行分析、拆解和组合,利用蒙特拉罗仿真技术,在虚拟世界中将真实路况进行拼接和重构,进而构建出更多的自动驾驶测试场景。在该仿真平台的加持下,使用相同里程的路测数据往往可达到常规仿真平台10倍以上的测试效果。杨文利博士形象的称“这就如同看电影和玩游戏之间的区别,前者只能在设定的场景下去看会发生什么,而后者能够通过主动融入来发掘很多未知的东西,高下立判”。
最后值得一提的是领骏科技搭载的矢量化的高精地图。这种地图采集制作耗时短、成本低、精度高;矢量数据也易于压缩,可实时在线传输,为领骏科技的自动驾驶解决方案提供支撑。
在四大核心技术的支持下,领骏科技依托正向的设计思维,将自动驾驶技术由高维的乘用车落在低维的巴士,打造出“小蚂居”系统两款自动驾驶巴士,实现用低维的数据反刍支持高维的技术研发,最终打造出从技术到产品,再到市场的商业化闭环。其中纯电动小巴具备了L2-L4自动驾驶功能,可以实现180km续航里程。这些车型适合城市接驳、社区出行、网约公交和定制公交等多样化场景,可以有效满足园区、景区、机场、学校、新型社区等需求。
构建实力强劲朋友圈领骏科技加速商业化落地
对于自动驾驶这样的项目,很少有企业可以靠自己单打独斗来完成。整合上游的核心零部件供应商以及与下游的整车企业客户建立紧密的合作关系,是目前自动驾驶技术公司较为主流的做法。我们所熟悉的百度Apollo、Momenta、小马智行等较为知名的自动驾驶技术公司都采用这种模式。
领骏科技,作为国内领先的自动驾驶技术公司,在生态构建方面同样也走在了市场的前列。在股东结构方面,武岳峰、九合、信天、臻忻、地平线等资源型投资人为领骏科技带来充足的资金保证;在政府层面,领骏科技已经在赣州市落地了项目公司,并在苏州、武汉、南京、西安等智能网联发达地区逐步铺开;在整车厂层面,领骏科技和包括金龙客车与吉利汽车等主机厂建立了比较深入的合作关系;而在自动驾驶生态方面,领骏科技也先后和地平线、黑芝麻、速腾聚创、亮道汽车等产业合作方形成产业协同。
作为自动驾驶芯片最炙手可热的企业,地平线几乎是国内每一家希望做自动驾驶技术的自主品牌车企的坐上宾。领骏科技不仅从地平线采购芯片,同时也为地平线提供决策规划模块,并联合研发域控制器,领骏科技和地平线的视觉芯片在生态上高度互补,进而可以帮助两家企业在产业和业务上高度互补,实现共赢。
作为国内自动驾驶技术公司的代表企业之一,按照领骏科技的规划,短期来看,2021年其已经落地无人巴士,“领骏科技自动驾驶车队规模要在今年底前达到百台规模”,杨文利博士信心满满的说到。这个市场预计到2026年将形成一个超过700亿美元的体量;中期来看,领骏科技也将从2022年开始发力城市支线物流,在这个可以达到数千亿美元的市场上去攻城略地;长期来看,领骏科技也即将进军数十万亿级的自动驾驶乘用车市场,最终通过大量投放相关车型,来实现高等级自动驾驶技术的持续迭代和落地。
自动驾驶极客杨文利博士创立的领骏科技,依靠“正向设计+系统工程”双轮驱动,早在2019年初就已经实现了L4级自动驾驶乘用车在复杂城市道路下测试运行,并达到了国内第一梯队的技术表现。然而,基于对行业发展周期的判断,领骏科技成立后并没有急于推出产品打开市场,也没有在资本面前崭露头角,而是埋头专注打磨技术、专心研发产品,这就有点像“Mobileye的研发性格”+“特斯拉的系统工程思维”+“Waymo算法能力”的集成体。
研发-市场-资本,将成为领骏科技加速商业化后公司发展互驱的新三角。
引用地址:http://news.eeworld.com.cn/qcdz/ic566030.html
本网站转载的所有的文章、图片、音频视频文件等资料的版权归版权所有人所有,本站采用的非本站原创文章及图片等内容无法一一联系确认版权者。如果本网所选内容的文章作者及编辑认为其作品不宜公开自由传播,或不应无偿使用,请及时通过电子邮件或电话通知我们,以迅速采取适当措施,避免给双方造成不必要的经济损失。
![]()