

引言
本文简要综述了所提出的清洗机制。然后介绍了聚VA刷摩擦分析结果。在摩擦分析中,刷的粘弹性行为、平板的表面润湿性以及刷的变形是重要的。此外,我们还介绍了PVA电刷和接触面之间真实接触面积的可视化结果。在半导体器件制造过程中,这次的专题“清洗与净化”是一个非常重要的事项。基本上半导体工厂都是洁净室,各种工艺都是在极度受控的环境下使用的。
实验
用PVA刷摩擦表面的清洗机构并不那么简单。那是因为使含有非常多液体的刷子在表面移动,因此提出了如图1所示的各种清洗模型。用液体和固体去除表面存在的粒子,为正混相流。
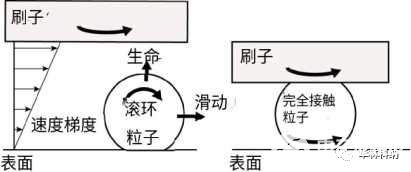
图1 粒子移动模型
另外,在这样的干洗中,据说粒子的除去性会根据进行 洗涤的高分子(洗涤工具)、要除去的粒子、以及被洗涤物 表面各自之间的分子间力的大小的不同、该高分子的形状而发生变化。例如对附着有二氧化硅粒子的PMMA平 面(被清洗物)进行清洗。面向壁虎自清洁机 制的阐明,报道了活跃的研究成果“3-7”O在利用模拟 它们的高分子进行干洗(不使用液体的干燥状态下的粒子 除去)中,图2中显示。
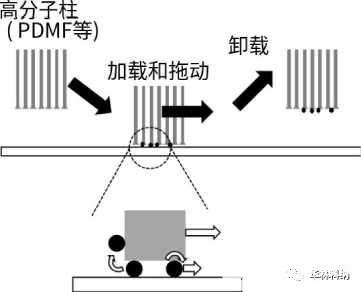
图2 加载-拖动-卸载运动中的干清洁
图3显示的是利用测压元件在板上压缩PVA电 刷时的垂直力FX和变形的关系。压入以应变 进行0.1次,压入后维持其变形30秒钟,然后 重复进一步压入的动作。
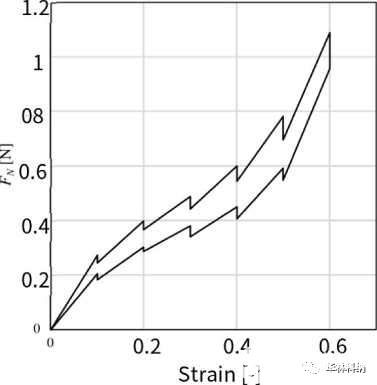
图3 P的常规和条纹关系
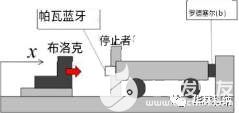
图4用不同类型的PVA刷进行了屏蔽 碰撞后压缩,与其碰撞速度v发生了 表示了与垂直力Fv的关系。如图所示,垂直力 随着谏度的增加急剧增加,根据条件的不同, 显示出了比Fig.3所示的准静态压缩时大近10倍 的值。另外,其上升量强烈依赖于所含水移动 的难易程度。由于PVA刷一般由模具制成,因 此表面存在被称为表层的气孔率较小的层,水 难以通过该层。因此,用这种层复盖的类型 a刷显示出较高的垂直力,用水难以排出但能 够移动的类型c刷显示出中间程度的值,而用 水容易从没有表层的部分排出的类型b刷则没 有观察到很高的垂直力“91。这样,通过碰撞 可以产生较高的垂直载荷。
类型a
移动操作器

图4 压缩速度von正规态度的效果 Fw
图4压缩速度V对正向力FN的影响。(a)实验设置和PVA电刷,(b)FN和V的关系。PVA电刷的折动特性:对象物表面润湿性的影响 在半导体制造工序中使用的PVA刷中,有被称为辐刷,复盖整个晶片,一边在水平轴 上旋转一边使用的刷,也有薄板和块形状 的刷,根据情况,有时在铅直轴上旋转一 边使用。其外观图如图5所示。
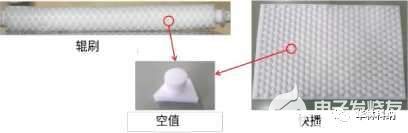
图5 聚乙烯醇刷子
结果和讨论
关于PVA刷的擦洗清洗,着眼于其剪切力进行了介绍。根据我们的实验,PVA电刷滑动时电刷与表面处于接触状态,剪切力因板的润湿性和电刷的变形状态而有很大差异。另外,介绍了剪切力生成机构模型。近年来,人们强烈希望进行非接触式洗涤。另一方面,也有一些清洗手法很难改变,比如广泛用于汽车、飞机等的雨刷技术。通过PVA刷的擦洗清洁也与超声波、喷射清洁等共存,并且预期它们在适当的材料和位置处继续使用。因此,需要进一步阐明关于每种洗涤方法的详细洗涤机制。
总结
根据阿蒙顿-库仑定律,动摩擦是恒定的,而与滑动度无关。的确,铝的结果,没有看到转速依赖性。另一方面,润湿性越差的材料,剪切力随转数而变化。这被预测为来自真实接触面积。已知真实接触面积随着接触时间的推移而增加,预计具有较长弛豫时间的PVA刷也同样增加真实接触面积。因此,我们认为,随着转速的增加,摩擦系数减小。另外,结节碰撞时水的行为也有差异。 预测这些也影响了摩擦力的差异。由于摩擦系数的值都大于0.5,即使液体粘度增加,摩擦系数的值也不会改变],并且在剪切力的时间序列数据中经常观察到粘滑现象,因此得出了PVA刷与表面直接接触的结论。
![]()