增程式电动汽车整车控制系统设计关键考虑功能需求、主要技术指标与控制信号类型,依据能量管理策略对增程器、驱动系统及动力电池等工作统一协调,从而使整车达到良好的经济性和动力性。
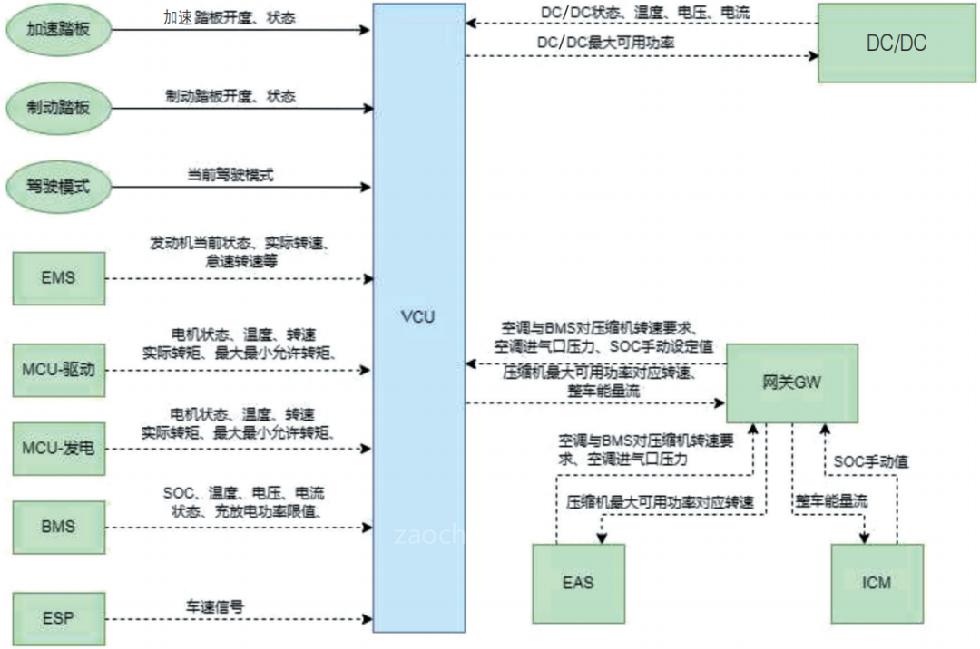
增程式电动汽车整车控制系统主要由增程器发动机控制单元(EMS)、发电机控制单元(GCU)、驱动电机控制单元(MCU)、动力蓄电池管理单元(BMS)、具备增程器协调控制的整车控制单元(VCU)和CAN/CANFD网络通信系统组成。增程式电动汽车整车控制系统原理,如图1所示。
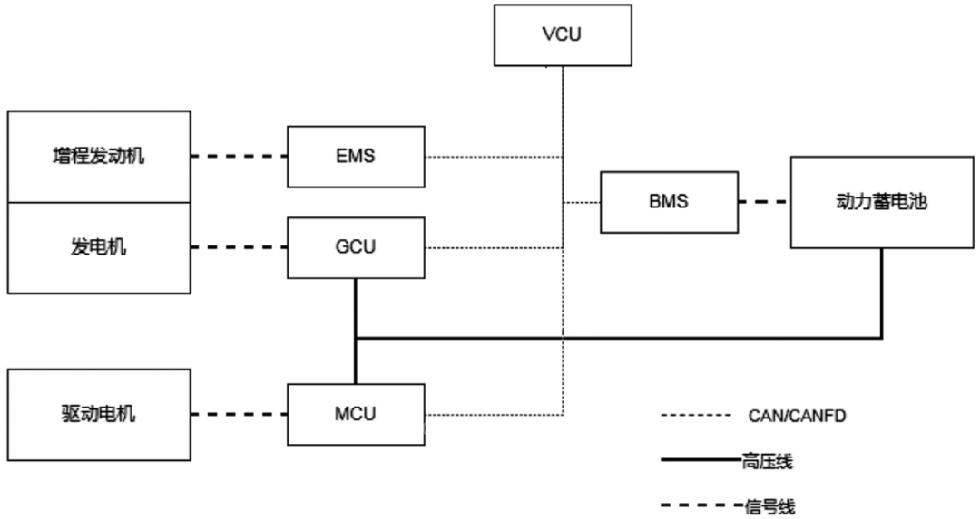
图 1 增程式电动汽车整车控制系统
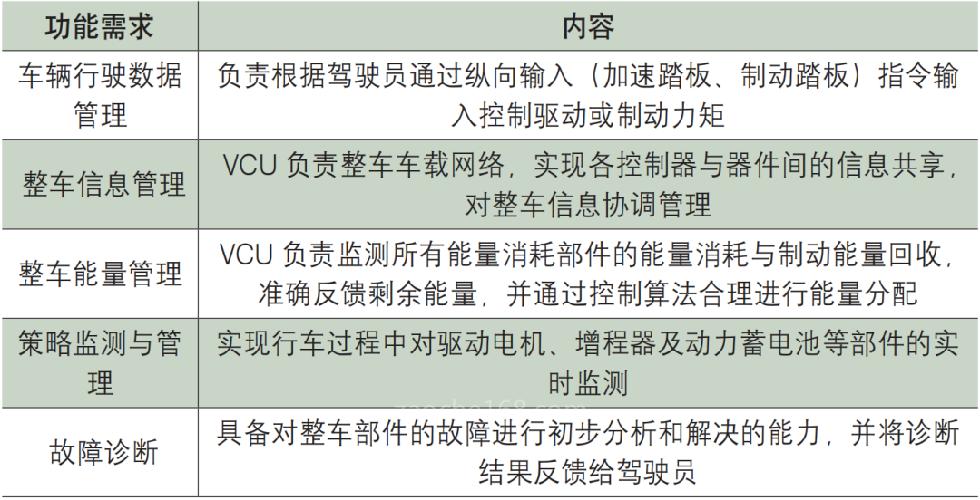
整车控制系统是车辆正确接收驾驶员指令并进行有效及时反馈处理的关键单元。
整车控制系统必须满足表1的功能需求。VCU为满足以上功能需求,需满足以下要求:
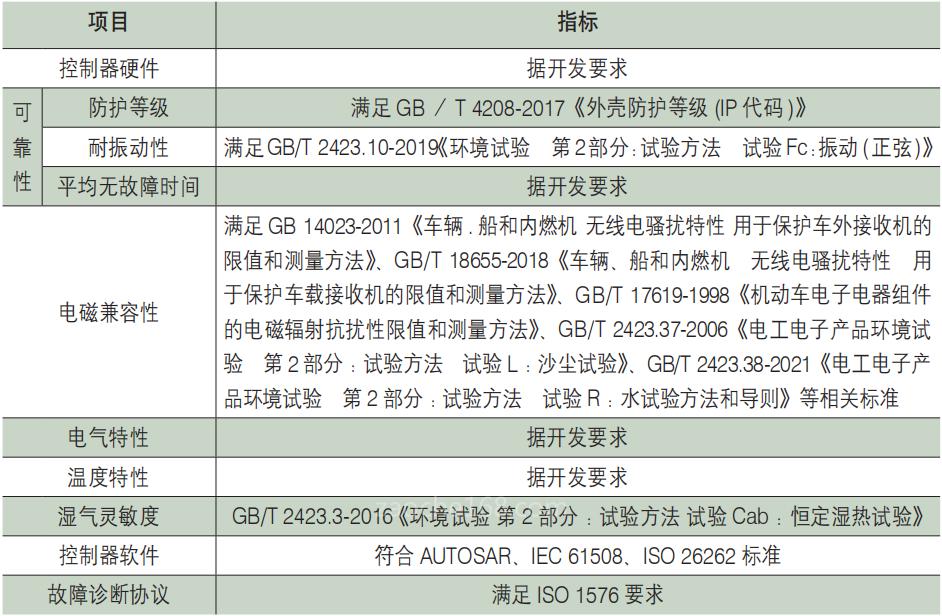
整车开发过程中需要关注的技术指标见表2,可根据实际项目开发情况进行增减。
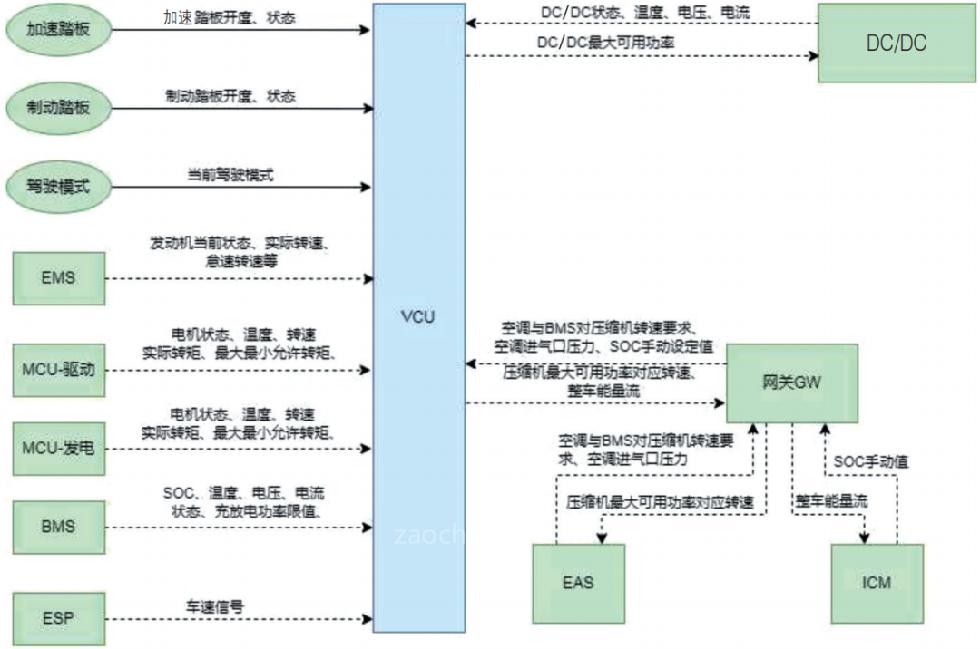
整车控制器VCU要满足功能需求,需满足一定的信号输入输出功能,见表3。控制信号通路数量需求根据整车控制需求具体确定。

增程式电动车的增程发动机与车辆完全解耦,不受行驶工况影响,其能量管理策略目标是根据驾驶员指令和行驶工况,全面协调动力系统中增程器、驱动电机、动力电池等部件的工作状态,合理分配能量流,使既满足汽车行驶不同模式切换,又保障动力系统各部件工作在最佳效率区域,从而提高整车系统效率。
高压能量管理是能量管理策略核心。高压能量管理是对高压用电附件的能量分配在正常及限功率的情况下进行优先级划分,确保优先功能的正常工作,如图2所示。驾驶舱和BMS对热管理的功率需求是分开的,VCU需要依据具体工况来考虑功率分配的优先级;热管理系统和动力需求冲突时,VCU需要依据具体工况来考虑功率分配的优先级:需要考虑不同工况下的动力源组合问题,需要考虑各种工况的覆盖度问题;BMS和电机在不同工况下既可以作为动力源,又可以作为能量消耗附件;VCU将能量流发送给仪表,用于显示。
车辆在动力蓄电池满电、油箱满油的初始条件下,以“多用电、少用油”为基本原则,据实时监测到的动力电池的SOC值和对驾驶员意图解析得到的需求功率Pd,实现增程器发电功率Pe和动力蓄电池的充放电功率Pb的最优分配,使车辆获得最长续驶里程。
式中,Pd为整车驱动需求功率(kW);Pe为增程器输出功率(kW);Pb为动力蓄电池充放电功率(kW)。
当车辆行驶里程小于纯电行驶里程时,增程器关闭,由动力蓄电池提供车辆运行所需功率;当动力蓄电池SOC值下降到预先设定的下限值时,根据控制策略适时起动增程器,切换到增程模式;在减速制动或滑行工况时,增程器与动力电池均切断动力,电机反转给动力电池充电。
增程式电动汽车整车控制系统主要根据整车功能需求,硬件设计指标在满足国家与行业标准的情况下,考虑所有控制信号需求;软件设计中控制算法重点考虑能量管理策略,从而设计出满足整车需求的增程式整车控制系统。