

GPS 测试中的一项重要因素是接收器的灵敏度。主要测试内容是捕获灵敏度和跟踪灵敏度。一般而言,地基天线接收到的 RF(射频)功率水平介于 -125dBm 至 -150dBm 之间,具体取决于环境因素。
为产生此范围内的极低 RF 功率水平,有必要采用外部无源衰减器来降低 LabSat 输出功率。如此以来,信号水平可被降至所需范围,并具有最低的附加噪声。衰减器的实测值应由用户确定,以适合待测试的设备,但作为一项指南,两个并用 20dB 衰减器(共计 40dB)可提供的 RF 功率范围约为 -125 至 -155dBm。
尽管用户记录的 RF 信号可以此方式用于测试,但建议的方法是使用 SatGen 软件所创建的计算机生成模拟文件。这是因为 SatGen 创建的文件会包含具有恒定信噪比的“纯”GPS 信号。用户记录的场景会包含记录时出现的额外噪声以及不断变化的信噪比,难于进行对比。

图片:采用 SatGen 所创建 GPS 信号的 RF 功率水平输出示例。-85dBm 至 -115dBm 的范围对应于标准 LabSat 输出范围。
通过在回放过程中调节衰减滑块,RF 功率输出水平可从 -85dBm 降至 -115dBm。
但由于 -85 至 -115dBm 的范围高于背景噪声水平,GPS 信号对于 GPS 接收器始终可见,因此测得的 C/NO dBHz 水平对于滑块衰减几乎没有关联性。降低 LabSat RF 水平就会发现 C/NO 存在一定程度的下降,但并非线性下降。
为 LabSat 添加 40dB 外部衰减,会将 RF 功率降至大约 -125dBm 至 -155dBm 的范围。该范围与 GPS 天线在户外接受的 RF 水平一致,并低于背景噪声水平。以此方式降低信号后,就可对 C/NO 实现更充分的线性控制。

上表所示为使用 LabSat 输出上的多种外部衰减器,以 UBLOX GPS 引擎测得的 C/No 值。对于每项外部衰减器值,LabSat RF 水平均按 5dB 的步阶变化。
根据表中所示,信噪比控制的线性度随着外部衰减的增加而改善。但如果外部衰减远高于 40dB,内部可用的滑块范围就会减少。
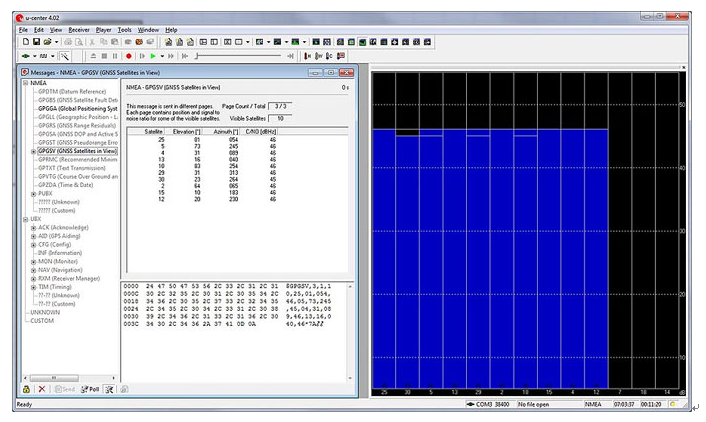
左侧屏幕截图所示为 UBLOX U-Center 软件的输出示例。GPGSV NMEA 信息会打开,以显示每颗卫星的 C/NO 水平。
UBLOX TIM-LA 装置采用以下设置进行测试:
LabSat
使用 SatGen 生成的静态场景
2 个 20dBm 衰减器 (Minicircuits VAT-20W2)
针对 TIM-LA,UBLOX 数据表采用 -138dBm 用于捕获灵敏度,-146dBm 用于跟踪灵敏度。使用上述设置,进行以下测量:

通过频谱分析仪对无衰减 LabSat 输出进行的基线测量得到 LabSat 计算值。测得的值使用 40dB 外部衰减器和滑块值进行加总,以获得估算的 RF 功率。
从中可以看出,根据用频谱分析仪进行的相对粗糙的校准,可获得接收器灵敏度的合理近似值。在试用时,建议用户采用专用 RF 功率计以得到更精确的读数,进而说明线缆与衰减器存在的偏差。
![]()