
工业 4.0 的愿景是将智能传感器与工业设备相结合,以提高生产力、提高可靠性并降低运营成本。这其中许多传感器将通过无线方式相互连接(例如,通过网状配置)或通过传感器网关。然后,该网络将连接到可以收集、分析和处理数据的云。工业物联网 (IIoT) 与物联网的不同之处在于设备必须实时执行操作并满足工业可靠性标准。
工业机器人是一类特殊的工业设备,可以高效、准确且可重复地执行手动任务。自 1960 年代以来,它们一直用于工厂及商业设施中。随着工业 4.0 的到来,这些机器人正在整合智能和新功能,使智能工厂成为可能。
除了在执行任务时更加灵活之外,工业机器人还能够收集和分析有关自身的数据,以提高生产力、服务质量和可靠性,同时降低总体总拥有成本。当连接到云端时,可以识别所有机器人的操作模式和趋势。
例如,可以分析故障以创建预测性维护算法,当机器人的操作配置记录文件有错误时会触发警报。使得问题能够在导致设备故障和停机之前得到解决,从而最大限度地减少损失。
随着越来越多的工业自动化 OEM 对机器人技术进行投资,工业机器人的增长仍在继续。自 2016 年以来,机器人行业以每年 7.6% 的速度增长(CAGR)。

1. OEM 继续投资于工业机器人技术,自 2016 年以来机器人行业以每年 7.6% 的速度增长(CAGR),即使将 COVID-19 考虑在内。
未来几年,工业机器人的开发者将面临一系列的问题。随着这些系统变得越来越复杂,可靠性变得越来越重要。本文将探讨以数据日志的形式从工业机器人收集运行数据的挑战,包括如何处理必须收集的数据以及如何在系统故障期间最大限度地减少数据丢失。
工业机器人的复杂性
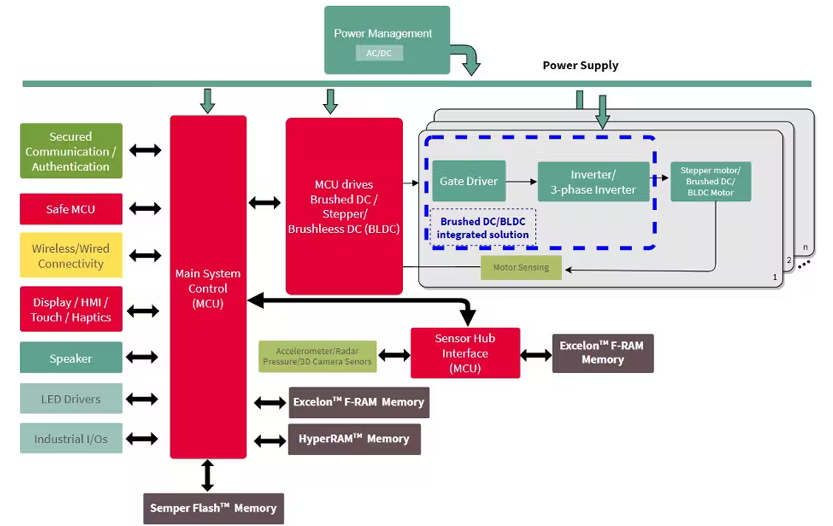
在最基本的形式中,工业机器人由机械手和控制器组成。机械手,通常被称为机械臂,可以移动、旋转和执行动作。

2. 工业机器人框图。
每个机器人机械手的各个部分通过机械关节连接,每个关节都提供一个运动轴。一个典型的机械手有六个活动关节或六个运动轴。
由高精度伺服或步进电机负责的每个轴都被限制在特定的运动范围内。此外,每个轴以不同的速度移动,通常在数据表中以每秒移动的度数列出。运动范围越大,关节的最高速度越快,控制运动所需的精度就越高。对更高协调性和精度的需求也增加了需要从跟踪机械手的每个传感器记录的操作数据量。
从可靠性来看,工业机器人必须能够从各种电源事件中恢复,例如断电。理想情况下,一旦电源故障排除,即使系统已重置,机器人也可以从停止的位置立即恢复操作。
为此,每台电机都必须能够保存关键参数和数据状态,包括机械臂的旋转角度和位置。同样,控制器需要维护详细的控制日志,记录每个轴的操作参数,包括其命令位置、编码器值和有效载荷。
此外,控制器必须保持伺服电机记录跟踪速度、扭矩、电机反馈传感(即电流、位置、速度)和运动角度。可靠地记录所有这些数据需要某种形式的非易失性存储器,以便数据不会因断电而丢失。
用于数据记录的非易失性存储器
在过去的几十年中,关键数据一直保存在电池供电的 SRAM 中。但是,这种方法有很多缺点:
需要几个组件(电池,电源管理控制器),占用更多的 PCB 空间以及增加故障点的数量。
为避免电池受热,通常需要在回流工艺之后安装电池,从而增加了制造成本。
工业机器人经常暴露在振动中,这可能导致将电池固定到位的连接器出现机械故障,从而降低整体可靠性。
电池需要进行维护和更换。
电池不符合 RoHS 要求,给厂商带来了处置问题。
由于这些原因和其他原因,OEM 已转向非易失性存储设备来替代电池供电的 SRAM。该表显示了可供 OEM 使用的一系列非易失性存储器技术。
由于 EEPROM 的耐用性较低,因此大多数应用都可以将其排除在外。工业机器人 24/7 全天候运行,并且必须记录大量实时数据。由于这些机器人可能会连续运行多年,EEPROM 最终会磨损,因此不是一个可行的选择。
Flash 的续航能力也有限。但是,闪存的耐用性问题通常可以使用在主机处理器上的磨损均衡软件技术来解决。当一个块开始出现超过设定阈值的错误时,磨损均衡算法会将数据移动到一个可靠执行的块中。
磨损均衡通过将磨损均匀地分布在闪存中,有效地延长了内存的使用寿命。但是,在整个内存中跟踪和移动数据的过程会增加主机 CPU 负载并引入写入操作延迟。
使用闪存进行数据记录时,最重要的考虑因素可能是它以块的形式写入数据。日志数据必须收集在缓冲区中,直到整个块准备好写入。磨损均衡算法可能涉及在大表中进行基于软件的查找,然后选择应写入数据的块。最后,闪存必须先擦除块才能写入。
只有完成这些任务后,才能最终写入日志数据。所有这些因素都会导致实际数据采集与写入直接的长延迟。
实时可靠性
如前所述,数据记录的两个主要原因是随时间推移的性能分析和电源事件恢复。对于这两个功能,可以说最重要的信息都是在发生故障时收集的数据。
在电源故障的情况下,数据将用于恢复和恢复工业机器人停止运行的确切位置。对于性能分析,此“最后时刻”数据对于了解故障前发生的情况以及可能导致故障发生的原因至关重要。
当系统发生故障或发生电源问题时,几乎没有时间做出反应。使用闪存和 EEPROM,缓冲区中的任何内容都将丢失。然而,这是最重要的数据。写入内存所需的时间越长,丢失关键数据的风险就越大。考虑一个在昂贵部件上运行的高精度机器人。如果机器人遇到电源故障,系统需要能够以高精度复位到中断的位置。否则,此次加工的零件可能要报废。
为了保持具有高可靠性的操作参数和数据日志,必须连续捕获数据并将其存储在非易失性存储器中。出于这个原因,机器人开发者正在转向铁电随机存取存储器 (F-RAM)。从表中可以看出,F-RAM 具有许多优势,使其成为存储关键操作参数和数据记录的首选。

F-RAM 具有 10的14 次方写入周期的耐用性,对数据记录应用程序具有无限耐用性。此外,F-RAM不需要磨损均衡,从而简化并降低了写入内存的延迟。
F-RAM 是一种不需要刷新周期的随机存取存储器。无需缓冲数据块,因为数据可以立即存储在非易失性存储器中。此外,F-RAM 的随机存取特性消除了内存分页带来的延迟。当数据被捕获时,它会被立即存储。
数据记录市场趋势
开发人员必须决定是在主控制器内集中记录数据,还是在每个电机的边缘记录数据。如今,在电机边缘侧的数据记录需要高达 1 Mb 的容量,而控制器则需要高达 16 Mb 的容量。
对于六轴机器人控制器等高速应用,英飞凌最新一代的非易失性存储器 Excelon F-RAM 提供更高密度的存储器和四通道 SPI 接口,以帮助提高吞吐量。对于数据记录要求较小的应用,则有密度较低单通道SPI的产品。
然而,随着工业机器人中轴和传感器数量的不断增长,数据记录的要求只会扩大(图 3)。同时,基于人工智能的性能和预测性维护算法将需要以更高的精细度访问更广泛的参数,从而增加必须收集和存储的数据总量。

3. 随着工业机器人轴数和传感器数量的不断增加,数据记录要求将随着时间的推移而增长。
影响非易失性存储器密度的另一个趋势是将记录功能移到更靠近网络边缘的位置。在每个电机中的高可靠性和功能安全的边缘计算与存储,可以消除将数据发送回主控制器的延迟。
许多制造商在每个电机上都使用微型控制器,其动作由主六轴控制器协调。因此,每个电机都会跟踪自己的参数和传感器。反过来,这将使更先进的人工智能和机器学习 (ML) 能力转移到边缘以及单个电机成为可能。
工业机器人中的其他存储器
除了数据记录存储器外,工业机器人还在系统中采用了许多其他存储器技术,包括将引导代码存储为扩展存储器。随着工业 4.0 的出现,保护系统免受网络威胁的需求激增。
黑客的主要目标之一是闪存设备,它存储启动代码、安全密钥和其他对系统正常功能至关重要的关键数据。在这方面,英飞凌开发了符合功能安全标准的 SEMPER Secure NOR 闪存,并集成了安全功能以保护代码免遭黑客攻击。
机器人控制器的日益复杂性导致许多机器人控制器还拥有自己的TFT显示器,以支持与技术人员的直接交互以及远程控制。对于缓冲数据、音频、图像和视频,或用作数学和数据密集型运算的暂存器,HyperRAM则非常适合作为工业显示器的扩展存储器。它在低引脚数串行 HyperBus 接口上具有高达 800MB/s 的传输率。
结论
数据记录是工业机器人的基本功能,可以从故障和电源事件中恢复,而不会对生产产生负面影响。通过提供将推动这些应用程序创新的数据,数据记录在启用新兴 AI 和 ML 功能(例如预测性维护)方面也发挥着重要作用。
F-RAM 的无限耐用性与其实时性、非易失性、高吞吐量和可靠的数据捕获相结合,使其成为针对工业机器人中高性能数据记录的非易失性存储器的强大选择。由于F-RAM可以保证在电源事故期间数据丢失最少,因此可以执行高精度恢复,机器人可以在复位或故障之前停止的位置继续操作。
F-RAM 有低密度和高密度可供选择,以满足不同应用的要求。这也使开发人员能够灵活地满足下一代机器人不断变化的需求,因为 AI 和 ML 功能越来越接近边缘。
![]()