
由于汽车领域对带宽的更高要求,CAN(控制器局域网)规范被扩展为灵活的数据速率,新的迭代称为 CAN FD。
CAN 具有成本、灵活性和鲁棒性等优势,所有这些优势都对许多领域的非汽车应用非常有利。CAN FD 扩展的市场机会更加广阔。本文介绍了 CAN 和 CAN FD 的基础知识,以及使用不同物理层或更高层协议的不同应用实现,CAN 作为数据链路层。
首先,让我们谈谈 CAN 相对于 RS232 或 RS485 等标准串行通信的优势。由于 CAN 具有更高的通信速度和错误检测功能,因此它具有出色的鲁棒性和更低的成本。
成本和灵活性
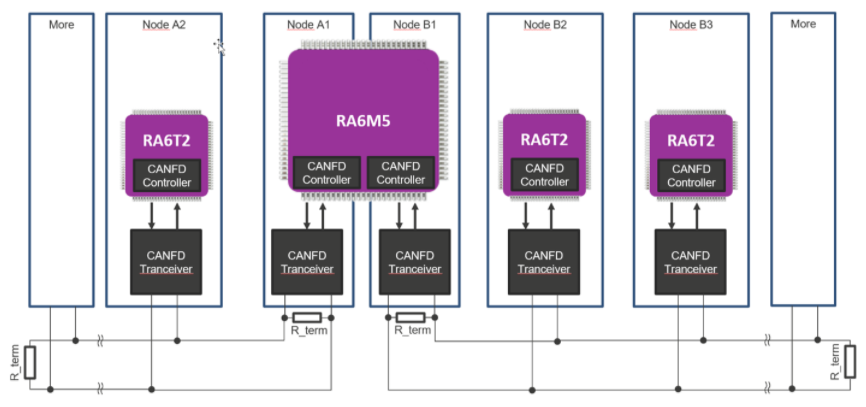
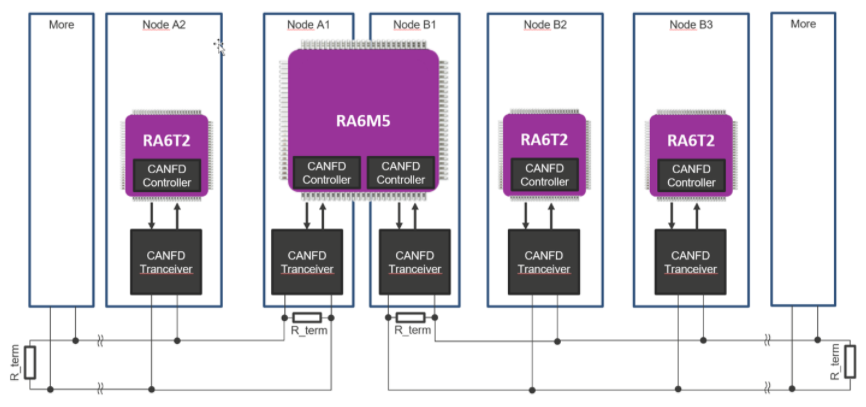
汽车行业最重要的驱动力是减少汽车中的布线数量。由于采用双绞线布线,布线相对容易,而且重量较轻,价格也不贵。终端电阻器对于高速运行 CAN 和 CAN FD 是必需的。灵活性是一个很大的优势,因为使用更多节点扩展系统非常容易。
错误检测和鲁棒性
CAN 和 CAN FD 包含非常可靠的错误检查机制。比特填充和监控在第一层工作,而帧检查、确认和循环冗余校验在 OSI 模型的第二层工作。
位填充在五个连续的高位或低位之后添加一个交替位。具有相同级别的六个连续位表示错误。位监控会读回发送的每条消息。如果存在差异(仲裁或确认字段除外),则检测到错误。一个很大的优势是可以非常及时地检测到错误。
由于数据长度不同,CAN 和 CAN FD 上的循环冗余检查实现方式不同。帧错误(有时也称为格式或格式错误)使用在接收方必须相同的预定义值。每条消息都需要被确认。这三个错误检查机制在消息级别上运行良好。
总之,CAN 和 CAN FD 通过多种不同的错误检查非常稳健可靠。在消息传输过程中不会丢失任何数据,并且可以防止消息冲突。每个节点在发送之前等待一段时间的不活动。情况二,同时发送消息,发送方检测哪个消息的优先级较高,并禁用较低优先级的消息。与两种消息都停止并稍后发送的以太网相比,在 CAN 上具有最高优先级的消息通过。
高速和低延迟
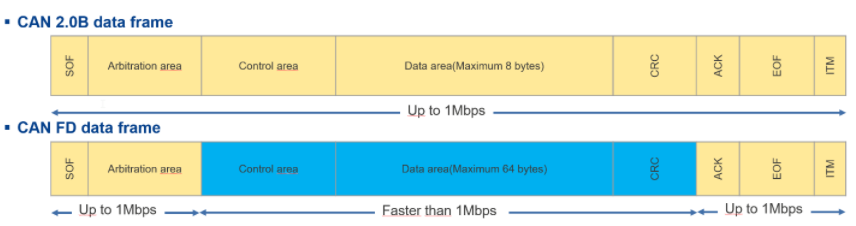
CAN 支持高达 1Mbps 的数据速率。借助 CAN FD,可以根据 CAN FD 控制器的最大时钟来提高控制和数据区域的数据速率。仲裁阶段的速率保持在最大 1Mbps。
CAN 的延迟小于 145us,而具有 8Msps 和 8Byte 数据的 CAN FD 小于 58us。
短数据帧在延迟方面具有优势。整个包的传输和解码速度更快,因此反应时间也更快。随着 CAN FD 上更高的传输速率,这种影响甚至更大。与为大数据量设计的 TCP/IP 通信相比,包较大,因此延迟增加。这意味着 CAN FD(取决于数据量)与 10 或 100Mbit 的 TCP/IP 通信相比可能具有更短的反应时间,并显示出更好的总实时性能。

限制
关于节点的数量,理论上没有限制,因为每条消息都可以发送到不同的节点。在实践中,每个节点都会在总线上引起信号反射,传输质量取决于 CAN 收发器和物理层的实现。
这也是长距离限制速度的原因。通常值在 CAN 上最多为 25 个节点,在 CAN FD 上最多为 8 个节点。
汽车以外的应用示例
为什么在汽车应用之外使用 CAN FD?由于上述的巨大优势。CAN 和 CAN FD 广泛应用于各个行业,包括:
楼宇自动化
- 电梯和升降机
- 门禁控制、灯光控制和安全开门器
- 空调
汽车售后市场
- 车队跟踪、车辆跟踪
- 记录预测性维护、远程信息处理、保险和黑盒
- 医疗保健设备
工业的
- 工业驱动
- 内阁
消费者
- 游戏机
机器人技术
- 在主机和链式执行器之间
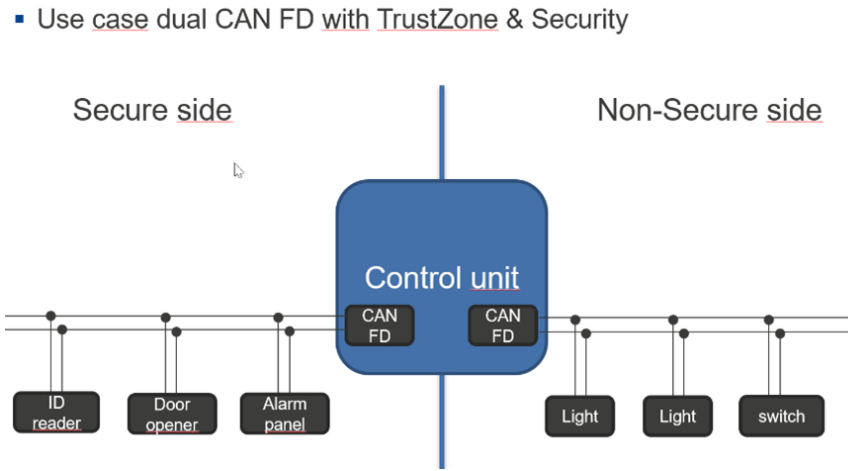
具有两个 CAN FD 控制器单元以及 TrustZone 和安全性的 MCU 的一个很好的用例是楼宇自动化中的控制单元,将安全部分与非安全部分分开。一个 CAN FD 控制器可用于安全侧,以控制关键组件,例如开门器、滑动门和 ID 卡读卡器。第二个 CAN FD 可用于楼宇自动化中的非关键控制部件,例如灯开关按钮、灯泡和建筑物内的门。
双 CAN FD 单元的另一个用例是网关功能,例如在大型楼宇自动化系统、大型机柜和通信扩展模块中。具有集成 CAN FD 控制器(如执行器、传感器和控制)的 MCU 有许多不同的用例。
CAN FD 非常适用于需要高安全性和可靠性的应用,例如机器人、升降机和运输系统,以及医疗和保健系统。汽车应用所需的可靠性要求在这些用例中也非常有益。
![]()